Na Zachodniopomorskim Uniwersytecie Technologicznym powstaje "dźwig przyszłości"



Naukowcy z Zachodniopomorskiego Uniwersytetu Technologicznego w Szczecinie razem z badaczami z Koszalina i Poznania budują "dźwig przyszłości". Ma być robotem sterowanym przez człowieka; będzie wykorzystywany m.in. w harvesterach, które pracują w lesie przy załadunku drzewa.
"Idea polega na tym, żeby z konwencjonalnego dźwigu, sterowanego manetkami, zrobić inteligentnego robota" – powiedział PAP w środę dziekan Wydziału Inżynierii Mechanicznej i Mechatroniki ZUT dr hab. inż. Mirosław Pajor. "Chodzi o to, żeby dźwig, w zależności od tego, jakie polecenie ruchu wyda operator, wyliczał, jak się mają poruszać poszczególne człony maszyny, a układ sterowania będzie automatycznie kontrolował ich ruch" - dodał.
Pajor zaznaczył, że w sterowaniu dźwigiem wprowadzono wiele innowacyjnych rozwiązań. Jednym z nich jest możliwość sterowania dźwigiem poprzez gest. W ZUT powstaje m.in. układ wizyjny, który śledzi operatora. „Ten pokaże dźwigowi, jak ma się poruszać, a maszyna to zinterpretuje i będzie się odpowiednio przemieszczać w zależności od wykonanego gestu" – wyjaśnił dziekan. Dodał, że do tego celu budowany jest specjalny multisensor, który posiada zarówno kamery wizyjne, jak i kamery na podczerwień, a także system lidar. Operatora będą też monitorować specjalne czujniki, które pozwolą maszynie odczytać i zinterpretować jego gesty.
Drugi system wizyjny będzie służył do śledzenia dźwigu. "Do tej pory to operator był za to odpowiedzialny. W +dźwigu przyszłości+ to układ wizyjny ma śledzić końcówkę dźwigu oznakowaną za pomocą odpowiednich markerów i wyliczać, jakie jest jej położenie w przestrzeni" – powiedział Pajor.
Operator ma też mieć specjalne gogle, nad którymi pracują naukowcy z ZUT. Dzięki goglom będzie widział otaczającą rzeczywistość, a system sterowania komputerowego wyświetli dodatkowe informacje. To pozwoli na dokładne określenie miejsca, w które zostanie odłożony przenoszony przez dźwig ładunek. System będzie też wyposażony w tzw. trzecie oko. Pozwoli to operatorowi maszyny na przełączenie obrazu tak, aby zobaczyć wszystko dookoła dzięki systemowi dodatkowych kamer.
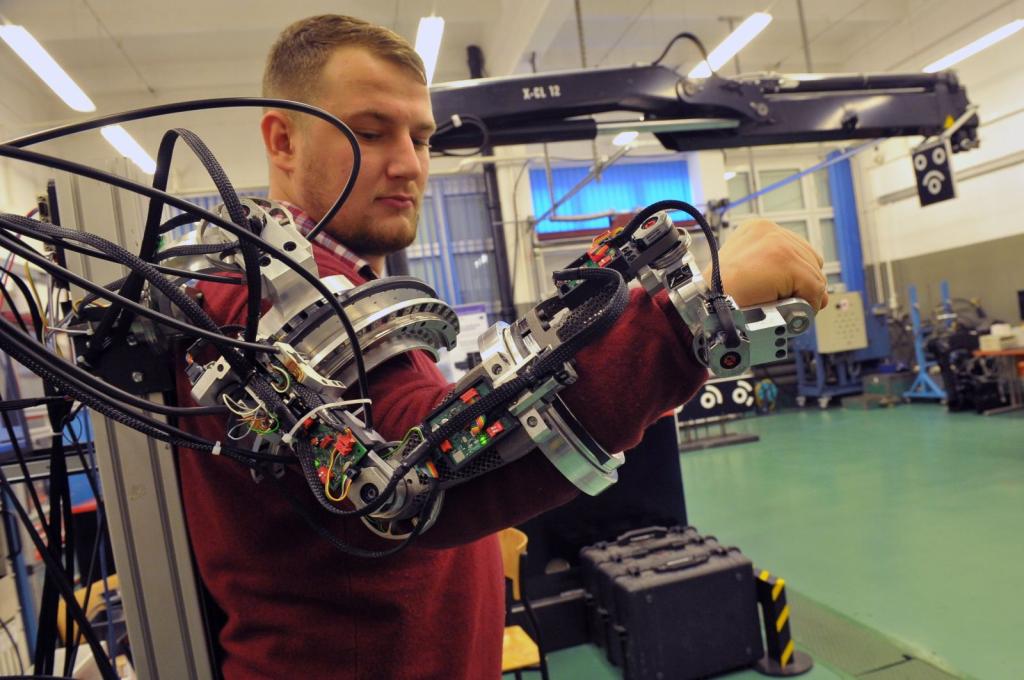
Najbardziej zaawansowanym elementem projektu jest egzoszkielet do sterowania dźwigiem. To mechaniczne ramię, które oddaje kinematykę ramienia ludzkiego. Wyposażony jest w liczne sensory, które kontrolują pozycję ramienia, ale też mierzą siłę, jaka działa na ramię. "Jeśli na przykład dźwig podniesie zbyt ciężki ładunek, operator poczuje to, oczywiście w odpowiedniej skali" – opisał Pajor.
System będzie również wyposażony w sensory nacisku, które pozwolą wyczuć intencje operatora. Jak zaznaczył dziekan Wydziału Inżynierii Mechanicznej i Mechatroniki ZUT, w planach jest testowanie możliwości zastosowania w urządzeniu elektromiografii, aby na podstawie śledzenia aktywności mięśni egzoszkielet mógł odczytać, co chce robić operator, i odpowiednio zareagować, wysyłając sygnały do dźwigu. Jak wyjaśnił Mirosław Pajor, egzoszkielet jest lekki i bardzo wytrzymały, a operator nie będzie go czuł. "System napędowy, znając pozycję egzoszkieletu i jego konstrukcję wytworzy takie siły, które będą go utrzymywać w stanie lewitacji, a operator będzie przejmował tylko wrażenia wysyłane z dźwigu" - powiedział.
Projekt jest finansowany przez Narodowe Centrum Badań i Rozwoju w ramach Programu Badań Stosowanych. Realizuje go czterech partnerów. Liderem i koordynatorem jest Zachodniopomorski Uniwersytet Technologiczny w Szczecinie. Współpracują z nim Politechnika Poznańska i Politechnika Koszalińska, a partnerem przemysłowym jest firma Cargotec, która udostępniła konstrukcje dźwigów do budowy stanowisk badawczych.
Politechnika Koszalińska pracuje nad systemem sterowania głosowego w mowie potocznej. Jak wyjaśniają autorzy projektu, chodzi o to, by nie były potrzebne ściśle sprecyzowane komendy. Dźwig ma bowiem rozumieć dowolnie sformułowane polecenia. "+Jedź w górę+ i +przesuń się w górę+ będą dla niego tym samym. Będzie można nim sterować po polsku lub po angielsku. Chodzi o to, żeby operator nie musiał się uczyć specjalnego języka, a mógł zwyczajnie +porozmawiać z dźwigiem+” – powiedział Pajor. Politechnika Poznańska natomiast pracuje nad manetką, która przenosi wrażenia siłowe. Jeśli więc dźwig uniesie zbyt duży ciężar, operator będzie czuł na manetce opór.
W założeniach autorów projektu dźwigi tego typu będą mogły być wykorzystywane m.in. w tzw. harvesterach (kombajnach zrębowych), czyli maszynach, które pracują w lesie przy załadunku drzewa. "To urządzenia, które mają złożoną kinematykę, wykonują wyrafinowane ruchy w przestrzeni, a operator musi mieć duże umiejętności i doświadczenie, aby nimi sterować. Teraz będzie to łatwiejsze" – powiedział Pajor. Jak podkreślił, głównym założeniem systemu jest to, by był intuicyjny, wspomagał operatora i ograniczał możliwość popełnienia przez niego błędu.
Autorzy projektu na maj zaplanowali integrację wszystkich elementów. Dźwig ma być gotowy we wrześniu. Koszt projektu to 4,0 mln zł.(PAP)
PAP - Nauka w Polsce
autor: Elżbieta Bielecka
emb/ agt/
Przed dodaniem komentarza prosimy o zapoznanie z Regulaminem forum serwisu Nauka w Polsce.